Satisficing-Planning MetricTime Track
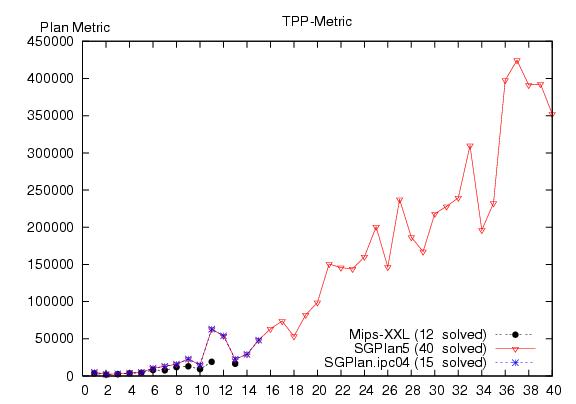
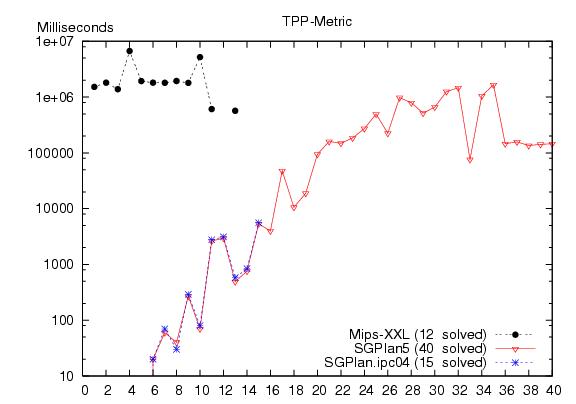
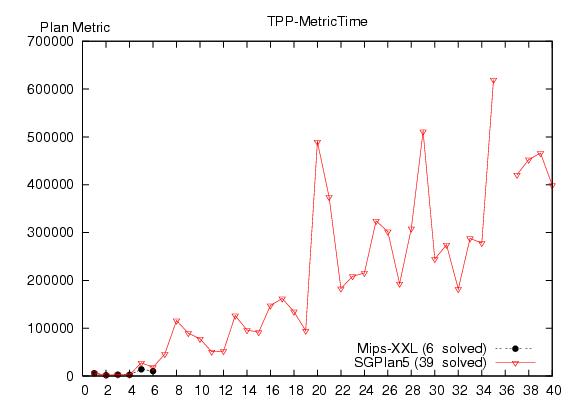
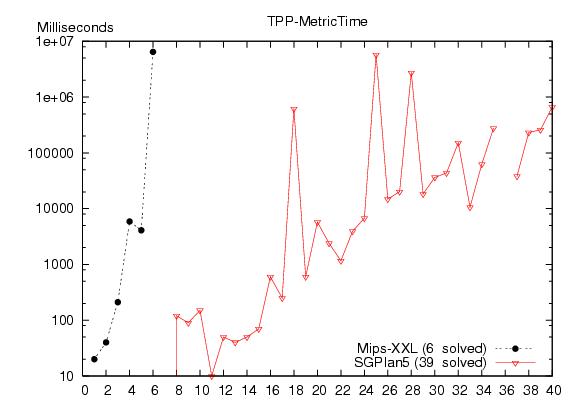
TPP
In this planning domain there are 40 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard. Computing the optimal
solution in this domain is known NP-hard problem.
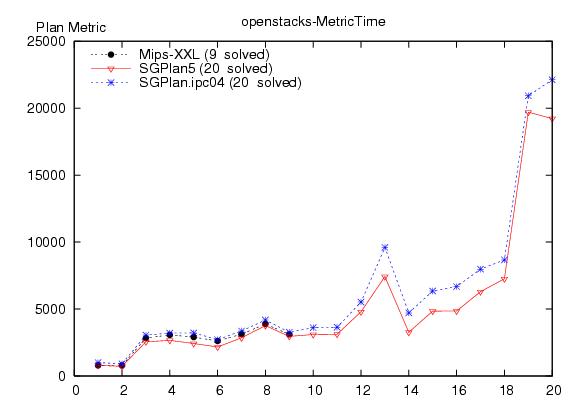
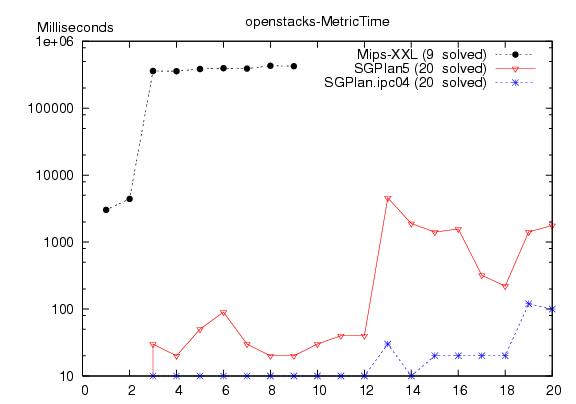
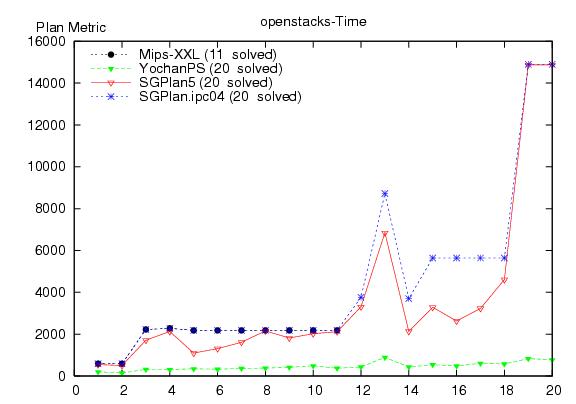
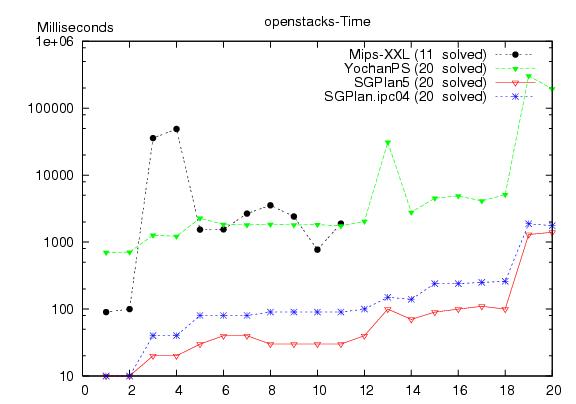
Openstacks
In this planning domain there are 20 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
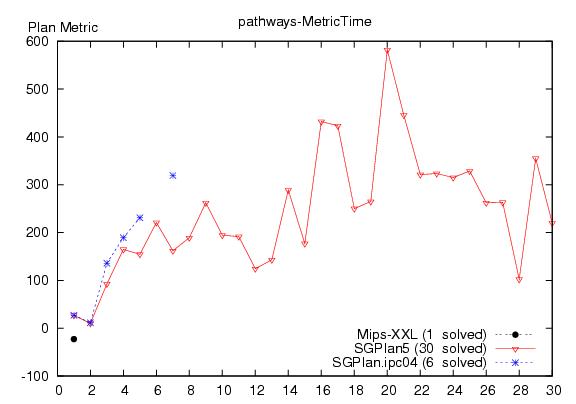
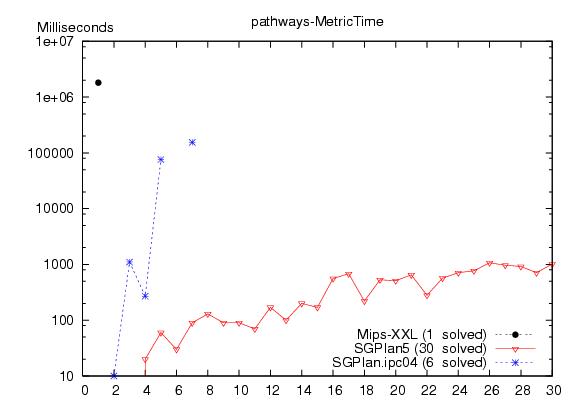
Pathways
In this planning domain there are 30 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
many cases even finding any valid plan is hard.
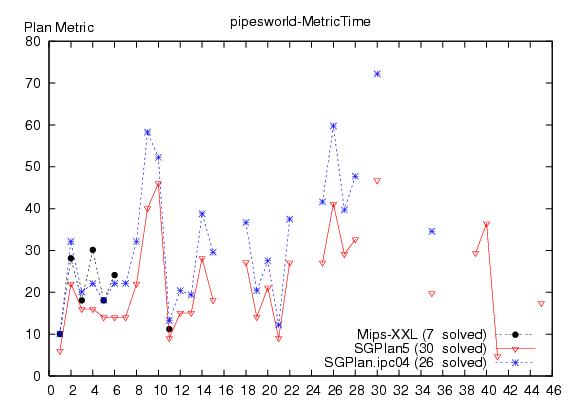
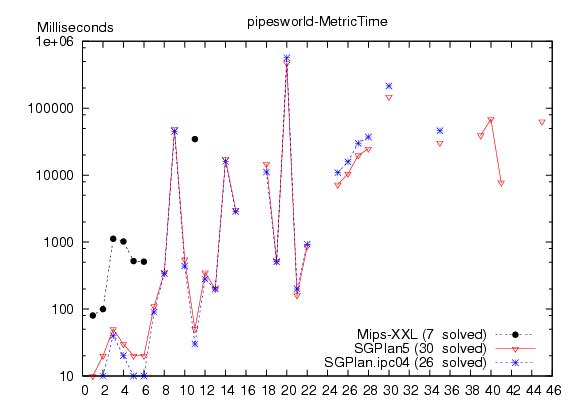
Pipesworld
In this planning domain there are 50 problems (named by numbers on the
x-axis). The problems not indicated are solved by no planner.
In the quality plot, the plan metric has to be minimized.
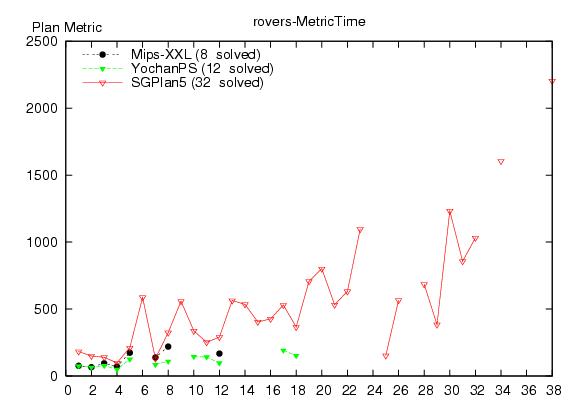
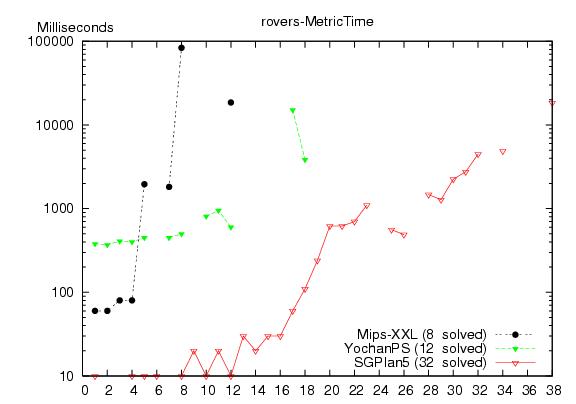
Rovers
In this planning domain there are 40 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
The problems not indicated are solved by no planner.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
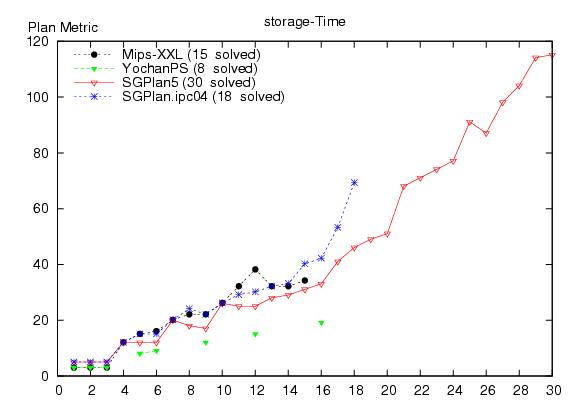
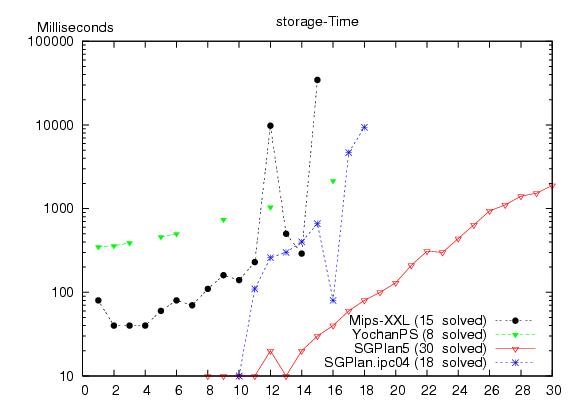
Storage
In this planning domain there are 30 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
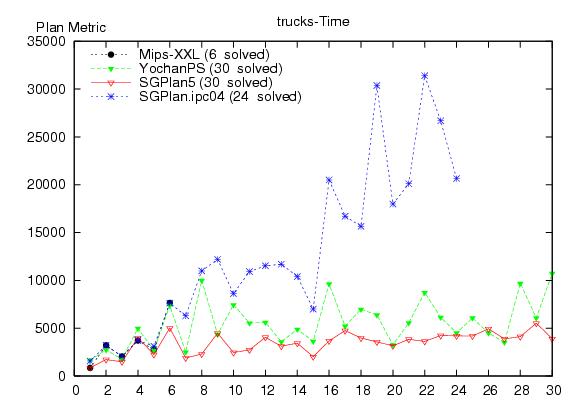
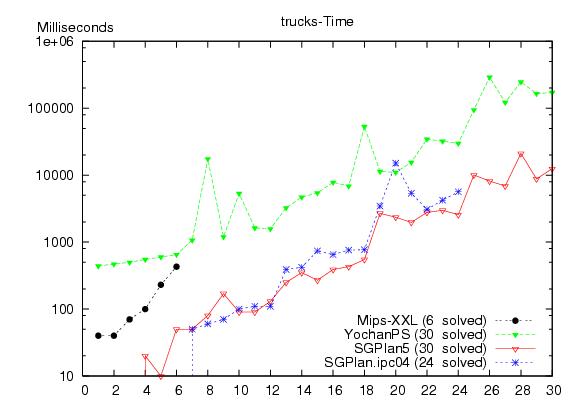
Trucks
In this planning domain there are 30 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.