PDDL3 SimplePreferences Track
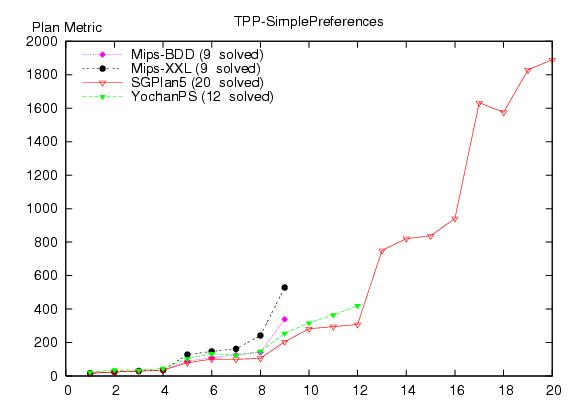
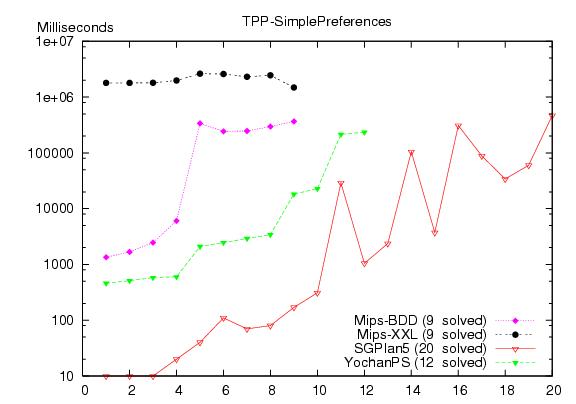
TPP
In this planning domain there are 20 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
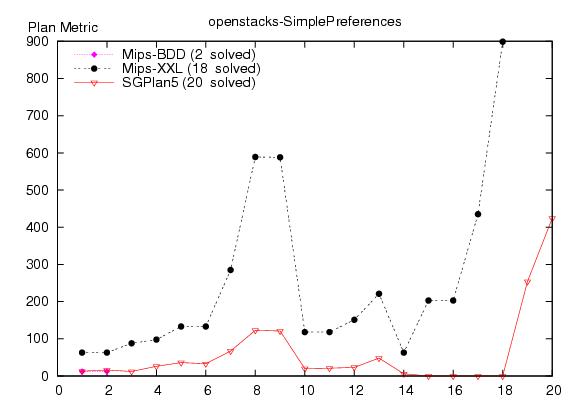
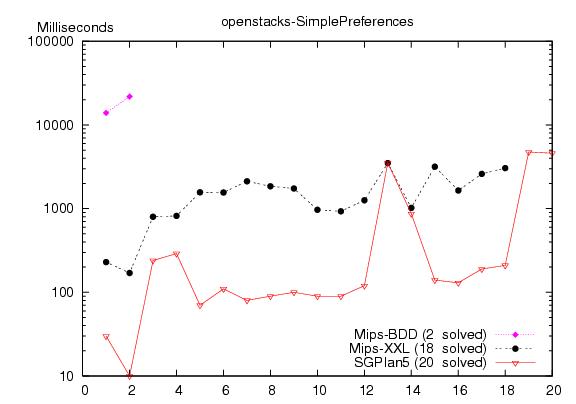
Openstacks
In this planning domain there are 20 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
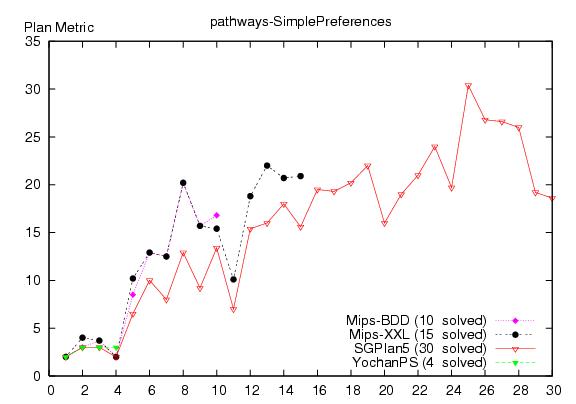
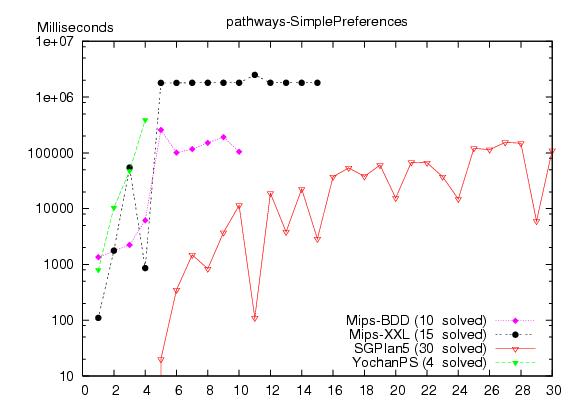
Pathways
In this planning domain there are 30 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
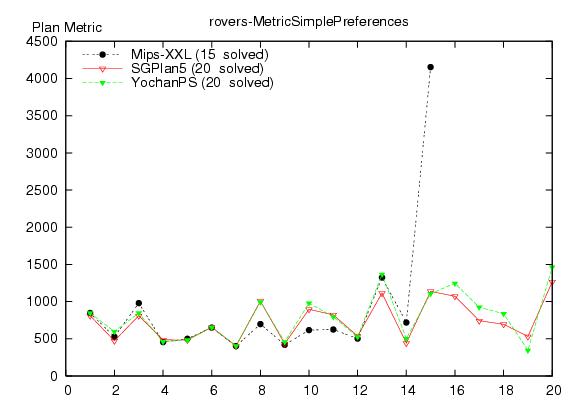
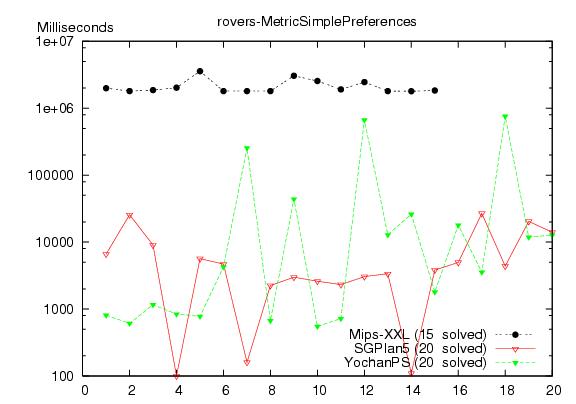
Rovers
In this planning domain there are 20 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
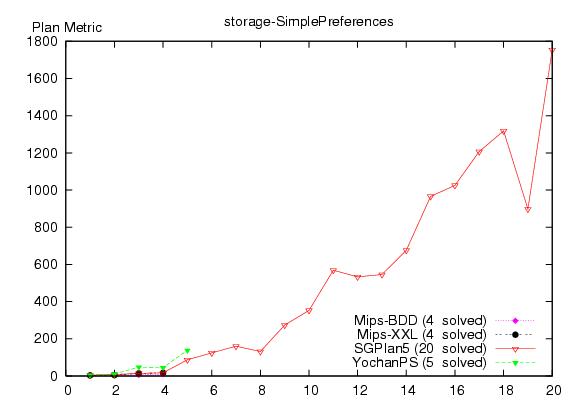
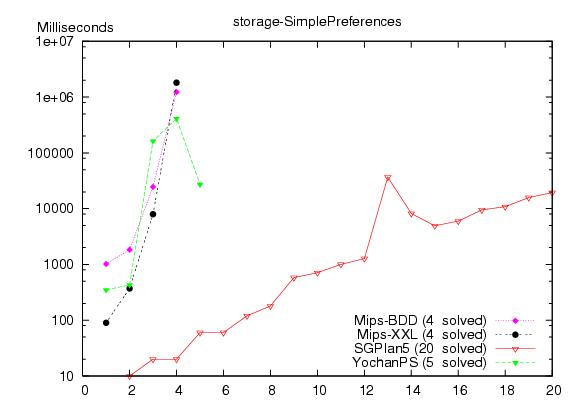
Storage
In this planning domain there are 20 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.
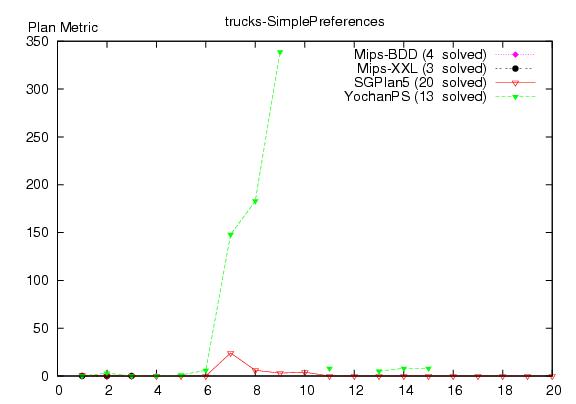
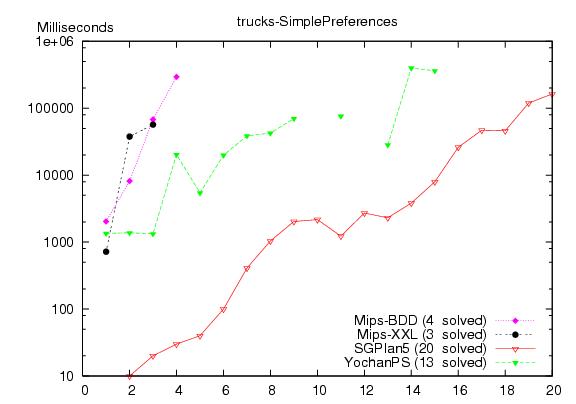
Trucks
In this planning domain there are 20 problems (named by numbers on the
x-axis). In the quality plot, the plan metric has to be minimized.
For the problems in this domain, the main challenge is computing a
valid plan with *good quality*, but for a fully-automated planner in
some cases even finding any valid plan is hard.